FMCW – Radar (Distanzmessung)
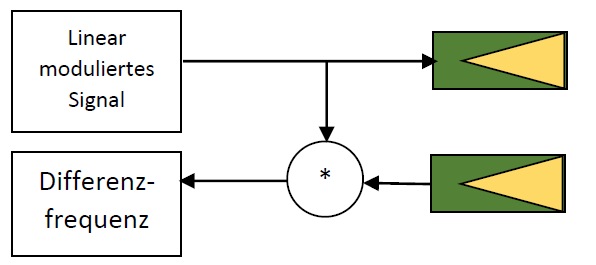
Mit einem FMCW (Frequency Modulated Continious Wave) Radar ist es möglich die Entfernung von ein oder mehreren Objekten zu messen. Hierbei wird ein möglichst linear moduliertes Signal ausgesendet welches an den Objekten reflektiert wird. Durch die Laufzeit kommt das Signal zeitversetzt wieder am Sender an welcher das Sende- und Empfangssignal mischt (multipliziert). Dadurch entsteht eine Summen- und eine Differenzfrequenz bei welchen die Summenfrequenz im bereich der doppelten Sendefrequenz liegt (mehrere GHz) und die Differenzfrequenz im Bereich von ein paar kHz. Dadurch ist die Summenfrequenz gut wegzufiltern und die Differenzfrequenz gut mit einem low-cost Mikrocontroller abtastbar.
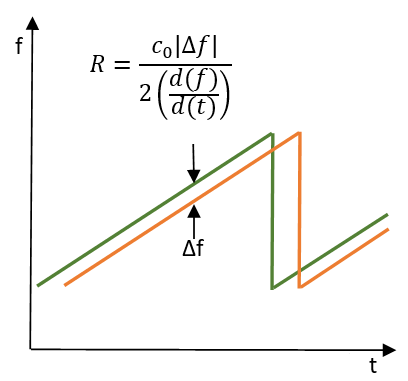
Da die Entfernung während einer Messung als konstant angenommen werden kann ergibt sich für jedes Objekt eine Differenzfrequenz (Δf) welche in direktem Zusammenhang mit der Laufzeit und darüber mit der Entfernung steht.
Im nebenan gezeigten Blockschaltbild erkennt man den einfachen Aufbau dieser Sensoren weshalb sie mittlerweile auch sehr preiswert zu bekommen sind.
Vorteile
- Gut skalierbar in Entfernung und Auflösung
- Resistent gegen äußere Einflüsse wie Lärm und Schmutz
- Kostengünstige Sensoren (< 10-50€)
- Entfernung und Geschwindigkeit kann simultan gemessen werden
Nachteile
- Keine Aussage über Richtung des Objekts
- Auflösung abhängig von Bandbreite –> Teils problematisch mit Gesetzgeber wegen ISM Band
Prinzip
Blockschaltbild
Das bietet KogiTEK
- Fundierte Beratung über Sensorauswahl und Frequenzbereich für Ihre Problemstellung
- Simulation Ihrer Aufgabenstellung
- Proove of Concept Messungen mit Demonstrationsgeräten von KogiTEK
- Individuelles Hardwaredesign maßgeschneidert für Ihren Anwendungsfall
- Implementierung der Software
- Herstellung von Prototypen und Unterstützung bei der Serie
- Alles in enger Zusammenarbeit mit Ihrer Entwicklungsabteilung
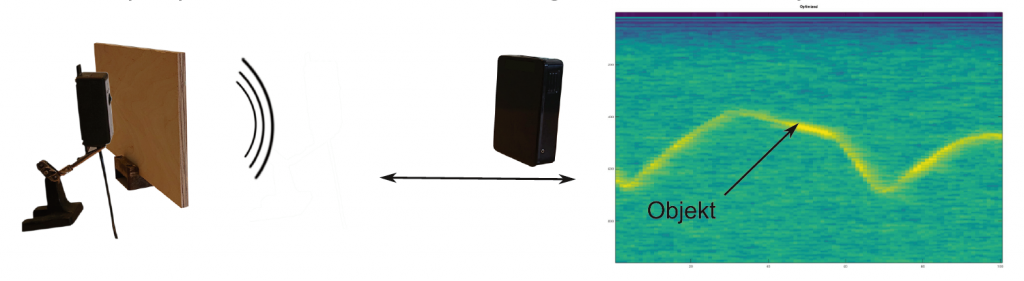
Beispielmessungen mit Materialdurchdringung
122GHz Sensor durchleuchtet eine fest in 40cm Entfernung platzierte 9mm Multiplex Platte. Im Hintergrund wird eine Metallkiste hin und her bewegt.
Man erkennt gut, dass die Holzplatte reflektiert und während der Messungen stets konstant platziert bleibt. Weiter erkennt man sehr schön die bewegte Kiste
hinter (unter) der Holzreflektion was die Materialdurchdringung bestätigt.
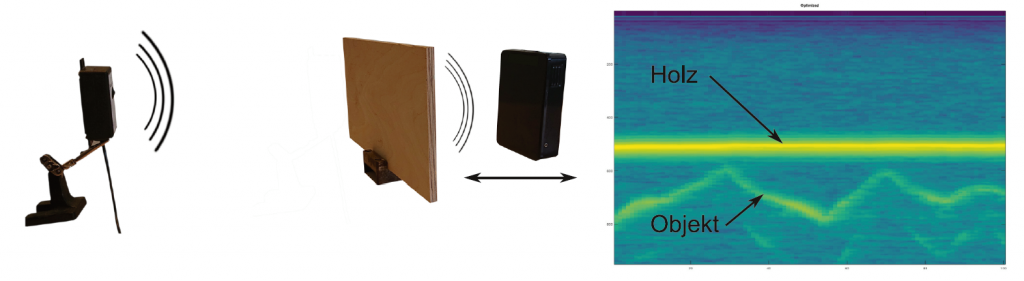
In einer zweiten Messung wird die Holzplatte direkt vor den Sensor platziert um Verschmutzung durch Spähne oder Staub zu simulieren.
Hier ist im Radarbild auffällig, dass von dem Holz nichts mehr zu sehen ist. Das liegt daran, dass der Gleichanteil mit einem Hochpassfilter unterdrückt wird und dadurch die ersten Zentimeter ausgeblendet werden. Für die Anwendung hat dies den Vorteil, dass Verschmutzung auf dem Sensor oder ein Gehäuse direkt über dem Sensor das Signal nicht stören und ausgeblendet werden können.